Hi,
I’ve been able to run the RPMSG echo example, even customize it for my needs and sending messages from the linux to the M4 works fine. I was using simple echo commands in terminal as suggested in the readme of the example.
When I run the ping pong example though, the M4 side does everything fine, it prints out all the pings and pongs, but I don’t get any output in the Linux terminal. The readme pingpong file suggests otherwise:
“The Cortex-A terminal displays the following information:”
get 1 (src: 0x1e)
get 3 (src: 0x1e)
......
get 99 (src: 0x1e)
get 101 (src: 0x1e)
But I get no output whatsoever. I am using the Verdin Mini and the SDK_2_12_1_MIMX8MM6xxxKZ
The second question that might be directly connected to the first: I then tried running a small C program to try and read any rpmsg messages on linux. I tried reading the ping pong and the str echo example.
The ONLY code example that reads the rpmsg messages on linux I could find was this one Rpmsg protocol failing with ims_rpmsg_tty on Linux. I only changed the tty device to “/dev/ttyRPMSG30”
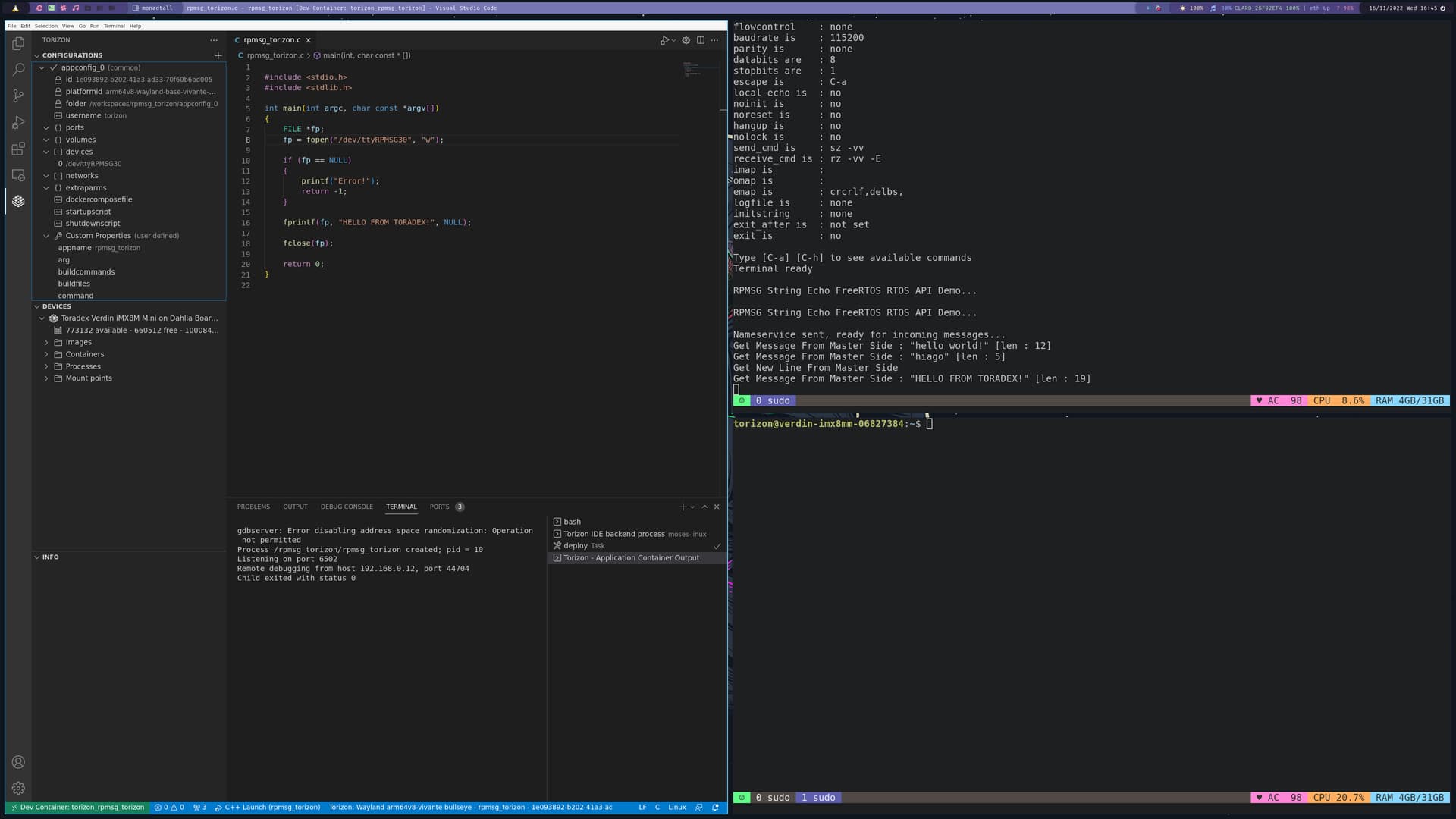
When debugging through the file I am already stuck on opening of the virtual device where the open function returns -1. I feel that this has to do more with my lack of experience with containers, I guess I have to announce the rpmsg device somewhere in the configuration, I have zero experience with this though, so any help or starting point would be appreciated!
Thanks