Hello,
I’m trying to use the internal CAN controller (flexCan) for colibri imx7.
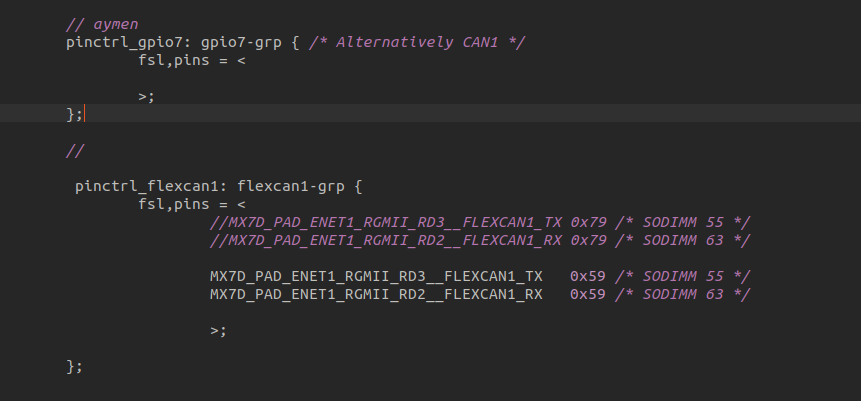
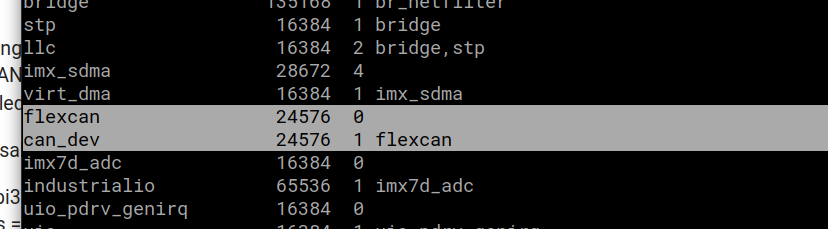
As you know the flexcan was disabled by default, so I activated it in imx7-colibri.dtsi as described here CAN (Linux) | Toradex Developer Center
Hello @aymen,
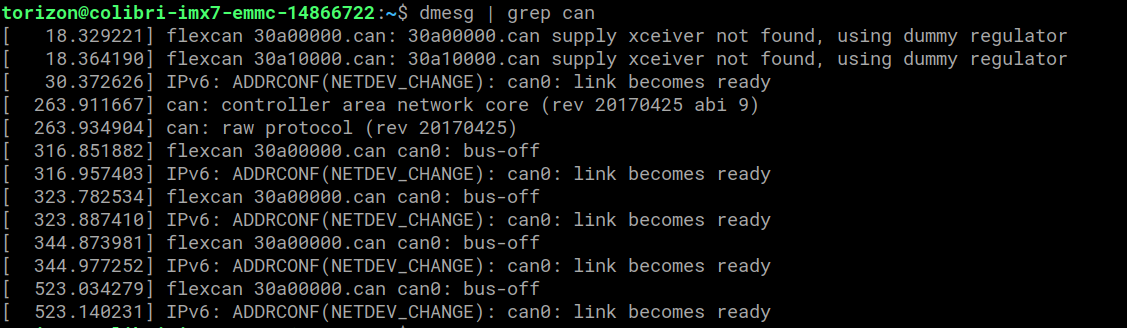
It looks like you have been able to successfully enable the CAN interface. However, the bus-off errors could be an indication there’s something wrong with the connections or with the other end of the CAN bus.
How are you testing the CAN interface?
What do you have on the other end of the bus?
Do the bus-off errors occur only when you try to cansend something?
Additionally, what version of Torizon are you using? What carrier board?
hello@rafael,
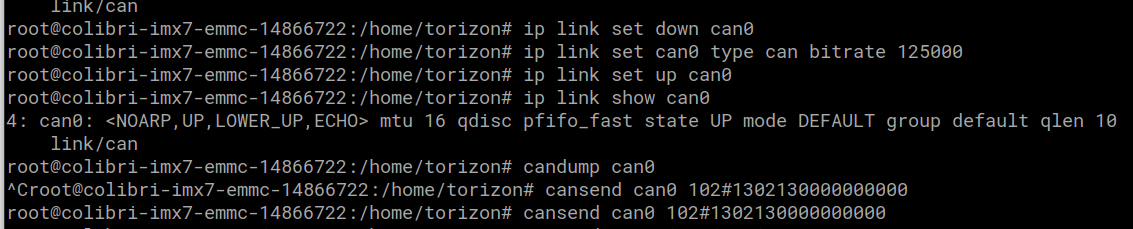
-I’m testing the CAN interface by sending and receiving messages using cansend and candump commands but no frame is displayed on the terminal.
On the other end of the bus, I have COM2020 device connected to the CAN bus.
-Bus-off errors occur when I try to send or receive using cansend or candump, no frame is displayed on the terminal.
-I am using Torizon Core 5 (5.7.2+build.20) with the Colibri iMX7 eMMC.