I have a Colibri imx6 DL.S on a Colibri evaluation board v3.2. I want to use both CAN interfaces.
I did modify the device tree to enable both CAN interfaces.
I have read the docs about CAN (Linux) I am confused by the following:
“For Colibri iMX6 it’s recommended to use the internal CAN controller rather than an external SPI connected controller if compatibility to other Colibri module types is not needed.”
“Remove the jumpers JP4/JP5 and use jumper wires to route the FlexCAN RX/TX signals to the CAN transceiver, bypassing the MCP251x CAN controller on Colibri Evaluation Board V3.2.”
How is this done?
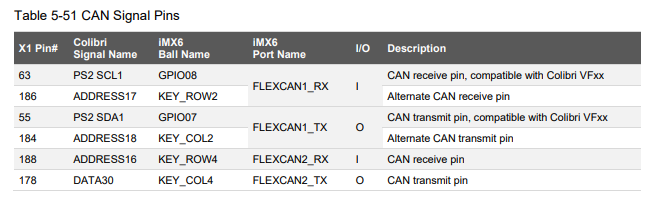
On the schematic I did find (X3-A20 is CAN2 RX and X3-B12 is CAN2 TX), where do they go from there?
With these jumpers, how does the CAN signals get to the DB9 connectors, if they can?
I was successful getting CAN1 to work, with the Jumpers installed JP4 and JP5 configuration
The command below shows:
zcat /proc/config.gz | grep CONFIG_CAN_MCP251X
CONFIG_CAN_MCP251X=m