Hi Toradex,
I’m implementing the Lora Gateway driver from Semtech :
Bad luck, this driver implement a reset.sh script that use the sys/class/gpio old fashion.
So I need, to expose this gpio to my C program running into my container.
My debian image build this driver that generate archive that i have linked into my C program.
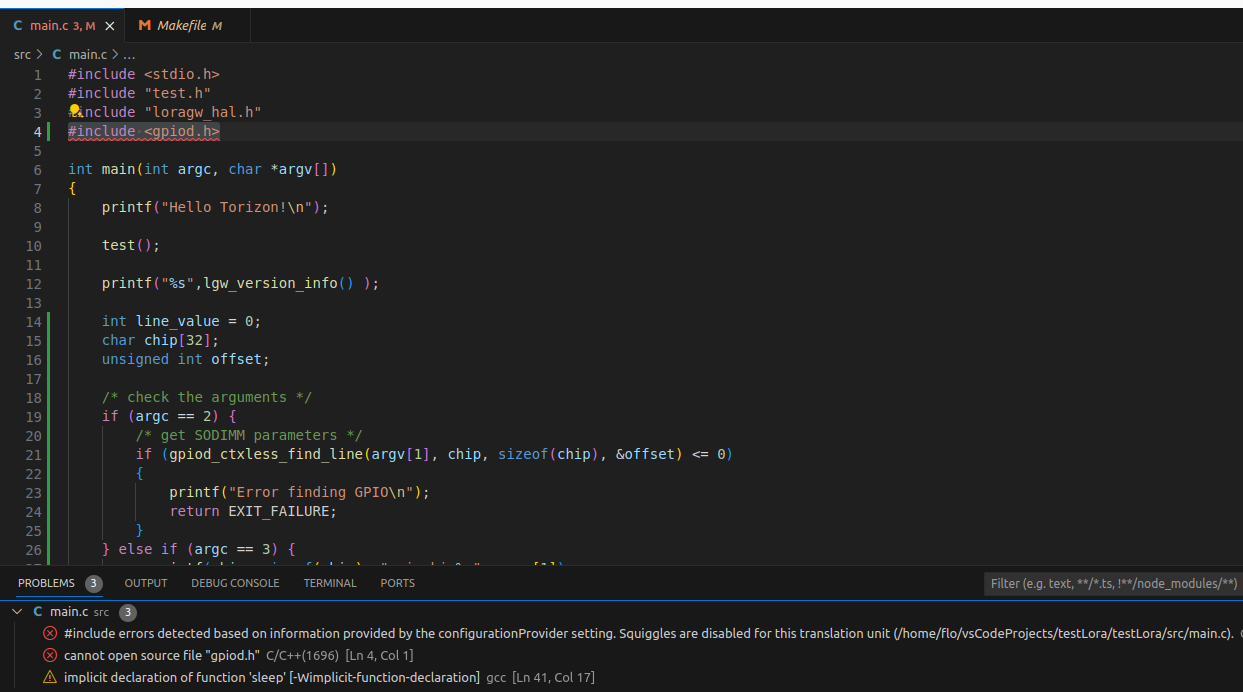
But first, to validate my hardware connexion, i would like to just execute the example util_chip_Id program that read the pciE sx1302 module connected to SPI + reset pins. This executable is compiled when we build th driver.
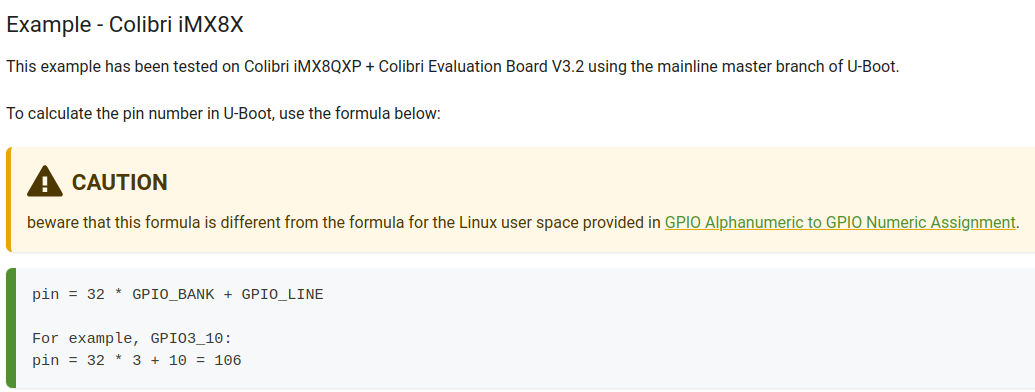
I didn’t find information in the documentation for AM62 on linux kernel gpio number computation:
When I look into: sys/class/gpio, there is three gpio : 344, 396 and 488.
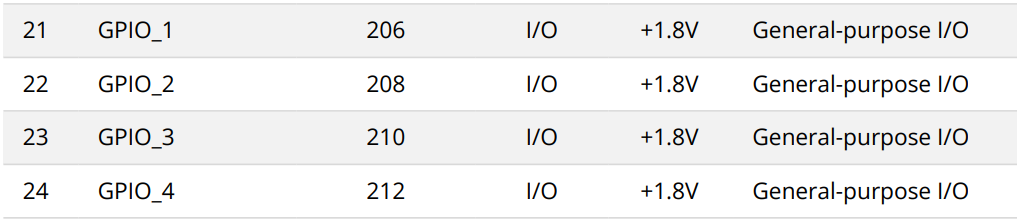
On my AM62 + Mallow board, I would like to use the GPIO 1,2,3,4 to control the reset signal etc…
So i’m searching the way to know the equivalence between the sys class export and the pin number on the mallow board.
An idea will be to modify the driver to use libgpiod also but I have difficulty to esptimate the effort for the moment.
Thanks!