Hi @pkg_su,
I’m not used to .NET myself, so I tested on my side using Python and it worked. I used the baud rate 115200. Can you try to change to 115200 to see if it works?
I deployed it inside a container with python, using the pyserial library.
#!python3
import serial
def main():
try:
with serial.Serial("/dev/ttyRPMSG30", 115200, timeout=1) as ser:
ser.write(b"Toradex!")
except Exception as err:
print(err)
if __name__ == "__main__":
main()
Please note that we need to write the bytes to the serial, not the actual string ("bToradex!").
And exposed the ttyRPMSG to my container on the docker-compose file:
services:
hmp-debug:
build:
context: .
dockerfile: Dockerfile.debug
image: ${LOCAL_REGISTRY}:5002/hmp-debug:${TAG}
ports:
- 6502:6502
- 6512:6512
devices:
- "/dev/ttyRPMSG30:/dev/ttyRPMSG30"
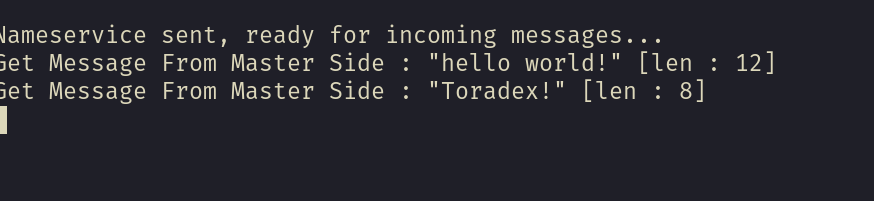
After running the container, everything worked fine:
Overlays:
torizon@colibri-imx8x-06995803:~$ cat /boot/ostree/torizon-0b063e02951e998cfb713cab409e226f0ed7ec343933815517ec68930a8f0228/dtb/overlays.txt
fdt_overlays=colibri-imx8x_parallel-rgb_overlay.dtbo colibri-imx8x_ad7879_overlay.dtbo display-vga_overlay.dtbo colibri-imx8x_disable-cm40-uart_overlay.dtbo
Let me know if that helps. Unfortunately, I can’t help too much with .NET, but I believe it’s just a matter of finding the right way to write to the serial with your code.
Best Regards,
Hiago.